CIRCULAR FAB
Jarandilla de la Vera · Arduino Week 2026
CIRCULAR FAB
Jarandilla de la Vera · práctica educativa de electrónica aplicada
INVERSOR
DE GIRO
2 RELÉS
Práctica educativa del Circular FAB Jarandilla de la Vera para controlar el sentido de giro de un motor DC utilizando Arduino, un módulo de 2 relés, fuente externa de 12V y tres pulsadores de control.
Objetivo: comprender cómo invertir la polaridad de un motor DC con dos relés, evitando activaciones peligrosas y documentando el proyecto para que pueda replicarse en talleres y centros educativos.
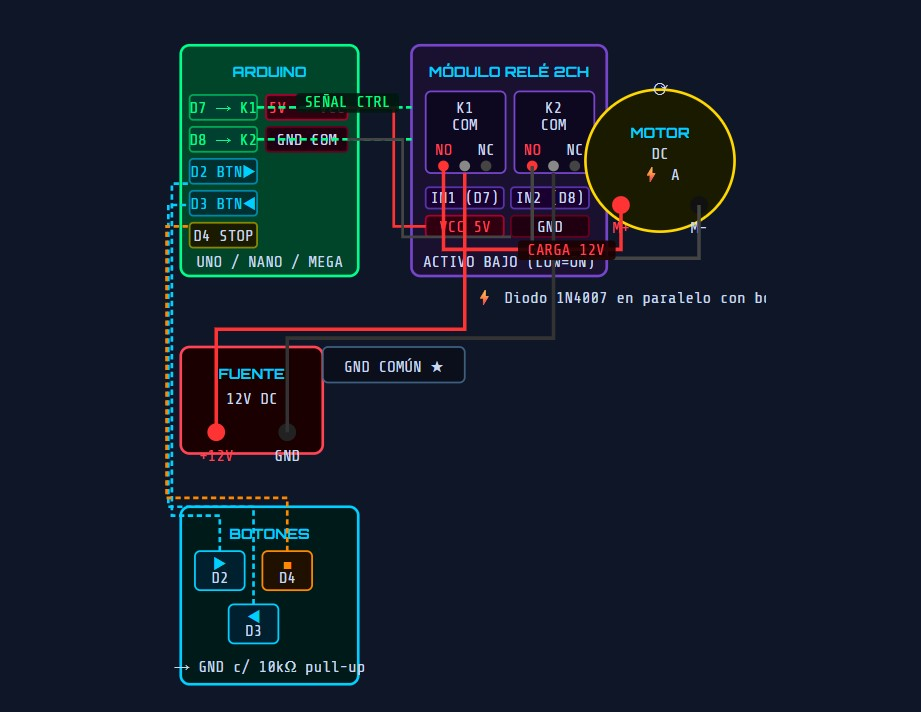
ESQUEMA ORIGINAL · INVERSOR DE GIRO CON 2 RELÉS
01 / MATERIALES
LO QUE USAMOS
Arduino UNO / Nano / Mega
Controla las entradas del módulo de relés y lee los pulsadores de avance, retroceso y parada.
Módulo relé 2 canales
Permite conmutar la alimentación del motor para obtener dos sentidos de giro. En muchos módulos: LOW = relé activado.
Motor DC 12V
Motor de corriente continua. Al invertir la polaridad en sus bornes, cambia el sentido de giro.
Fuente externa 12V DC
Alimenta el motor. El Arduino solo entrega señales de control al módulo relé.
Pulsadores ×3
Adelante, atrás y stop. Usan INPUT_PULLUP, por lo que se conectan entre pin y GND.
Protección recomendada
Diodos de protección si se usan relés sueltos y comprobar siempre la corriente máxima del módulo.
02 / CONEXIONES
TABLA DE PINES
| ELEMENTO | CONEXIÓN | DESCRIPCIÓN |
|---|---|---|
| Arduino D7 | IN1 / K1 | Controla el relé K1: giro adelante. |
| Arduino D8 | IN2 / K2 | Controla el relé K2: giro atrás. |
| Arduino 5V | VCC relé | Alimenta la lógica del módulo de relés. |
| Arduino GND | GND común | Debe unirse con GND del módulo y negativo de la fuente. |
| Arduino D2 | Botón adelante | Pulsador entre D2 y GND. INPUT_PULLUP. |
| Arduino D3 | Botón atrás | Pulsador entre D3 y GND. INPUT_PULLUP. |
| Arduino D4 | Botón STOP | Pulsador entre D4 y GND. INPUT_PULLUP. |
| Fuente +12V | COM K1 | Línea de alimentación positiva para el motor. |
| Fuente GND | COM K2 | Retorno/negativo de la alimentación del motor. |
| NO K1 / NO K2 | Motor M+ / M- | Salidas hacia los bornes del motor DC. |
// DIAGRAMA DE SEÑALES
── CONTROL ARDUINO → RELÉS ────────
Arduino D7
IN1 · Relé K1
Arduino D8
IN2 · Relé K2
── BOTONES ─────────────────────────
D2 / D3 / D4
Adelante · Atrás · Stop
GND
── POTENCIA 12V ────────────────────
+12V
COM K1
Motor M+
GND fuente
COM K2
Motor M-
⚠ NO ACTIVAR K1 Y K2 A LA VEZSi ambos relés se activan simultáneamente puede producirse un cortocircuito. El código apaga uno antes de activar el otro.
✓ GND COMÚNArduino, módulo de relés y fuente externa deben compartir referencia de masa.
⚡ MÓDULO ACTIVO BAJOEn este ejemplo se asume LOW = relé activado y HIGH = relé apagado. Comprueba tu módulo.
ℹ ESQUEMA CONSERVADOSe mantiene el esquema de dos relés que ya teníamos, sustituyendo la práctica de Tinkercad por el montaje correcto.
03 / LÓGICA
CÓMO FUNCIONA
// TABLA DE VERDAD
K1 OFF
K2 OFFMotor parado
K2 OFFMotor parado
K1 ON
K2 OFFGiro adelante
K2 OFFGiro adelante
K1 OFF
K2 ONGiro atrás
K2 ONGiro atrás
K1 ON · K2 ONEstado prohibido: riesgo de cortocircuito.
✓ ADELANTESe apaga K2 y después se activa K1. El motor recibe polaridad en un sentido.
✓ ATRÁSSe apaga K1 y después se activa K2. La polaridad del motor se invierte.
⚡ STOPAmbos relés quedan apagados. Es el estado seguro al arrancar y al pulsar parada.
ℹ BOTONES Y SERIALSe puede controlar con botones o desde el monitor serie: f, b y s.
04 / CÓDIGO
SKETCH ARDUINO
inversor_giro_2_reles.ino
// ════════════════════════════════════════════════════════ // INVERSOR DE GIRO — 2 relés + Arduino // Módulo relé activo bajo: LOW = activado / HIGH = apagado // Pines: D7=K1, D8=K2, D2=adelante, D3=atrás, D4=stop // ════════════════════════════════════════════════════════ #define RELE1 7 #define RELE2 8 #define BTN_FWD 2 #define BTN_BWD 3 #define BTN_STP 4 void setup() { Serial.begin(9600); pinMode(RELE1, OUTPUT); pinMode(RELE2, OUTPUT); pinMode(BTN_FWD, INPUT_PULLUP); pinMode(BTN_BWD, INPUT_PULLUP); pinMode(BTN_STP, INPUT_PULLUP); motorStop(); } void loop() { if (digitalRead(BTN_FWD) == LOW) { motorFwd(); delay(250); } if (digitalRead(BTN_BWD) == LOW) { motorBwd(); delay(250); } if (digitalRead(BTN_STP) == LOW) { motorStop(); delay(250); } if (Serial.available()) { char cmd = Serial.read(); if (cmd == 'f') motorFwd(); if (cmd == 'b') motorBwd(); if (cmd == 's') motorStop(); } } void motorFwd() { digitalWrite(RELE2, HIGH); delay(10); digitalWrite(RELE1, LOW); Serial.println("▶ ADELANTE"); } void motorBwd() { digitalWrite(RELE1, HIGH); delay(10); digitalWrite(RELE2, LOW); Serial.println("◀ ATRÁS"); } void motorStop() { digitalWrite(RELE1, HIGH); digitalWrite(RELE2, HIGH); Serial.println("■ STOP"); }
05 / SIMULADOR
PRUEBA EL SISTEMA
MOTOR VIRTUAL — 2 RELÉS
K1 · D7
OFF
K2 · D8
OFF
K1 OFF
K2 OFF
SERIAL MONITOR — 9600 baud
// Arduino booting...
// D7 y D8 configurados como OUTPUT
// D2 · D3 · D4 configurados como INPUT_PULLUP
Sistema listo. Estado seguro: STOP